盾构机换刀机器人项目视觉伺服方向研究成果在JFR发表
《Visual Servoing With Grid-Based Directional Error Mapping for Robotic TBM Disc Cutter Replacement》
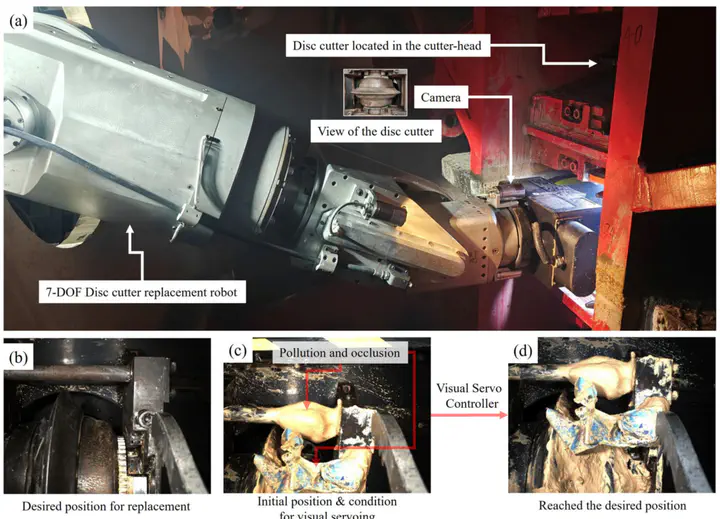
硕士生杨强在《Journal of Field Robotics》期刊发表论文,题目为《Visual Servoing With Grid-Based Directional Error Mapping for Robotic TBM Disc Cutter Replacement》。文章提出了一个由图像网格组成的基于图像的期望向量场。其次,提出了一个直接和恒定的交互矩阵,以从基于图像的所需向量映射相机速度。这两个部分提高了基于视觉的控制器的视觉伺服的稳健性,特别是在污染环境中工作和伺服滚刀的不确定状态时。实验验证了它是一种稳定、易用的视觉控制器,克服了在非静态环境条件下控制刀具更换机器人的困难,从而促进了机器人技术在更多现场应用。