Design of a Differential Modular Joint-based Nursing Manipulator and its Digital Twin System
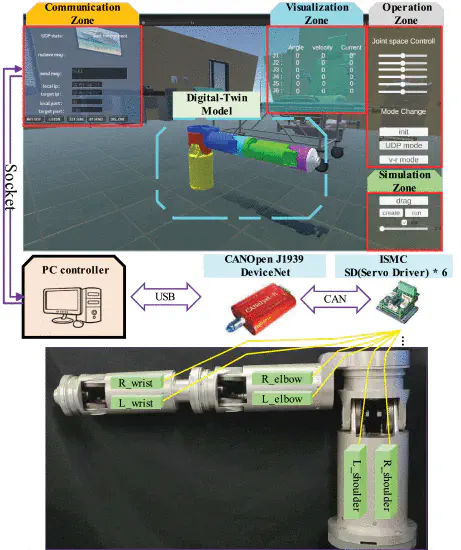 Implemented digital twin of the nursing robot system
Implemented digital twin of the nursing robot system
Abstract
We designed and developed a humanoid nursing manipulator to meet the demands of nursing and patient transfer scenarios, with specific consideration given to heavy loads and human-machine interaction. Differential transmission structure was used to determine the parameters of the robot’s driving mode and joint configuration, resulting in a compact structure with greater torque output under the same weight, which enables the robot to perform nursing tasks such as lifting and holding patients. We conducted a transmission principle analysis and kinematic decoupling on a robotic arm composed of differential modular joints. Using Unity, we developed a digital twin system for the nursing robot that enabled bidirectional exchange of information and mapping between the physical entity and its virtual counterpart. To evaluate the performance, we designed nursing experiments and conducted tests on both the physical robot and its digital twin system. The experiments have confirmed that the robot meets the nursing task design specifications. Additionally, the digital twin system enables real-time visualization, bidirectional control, and simulation in virtual environments.