Adaptive Neural Computed Torque Control for Robot Joints With Asymmetric Friction Model
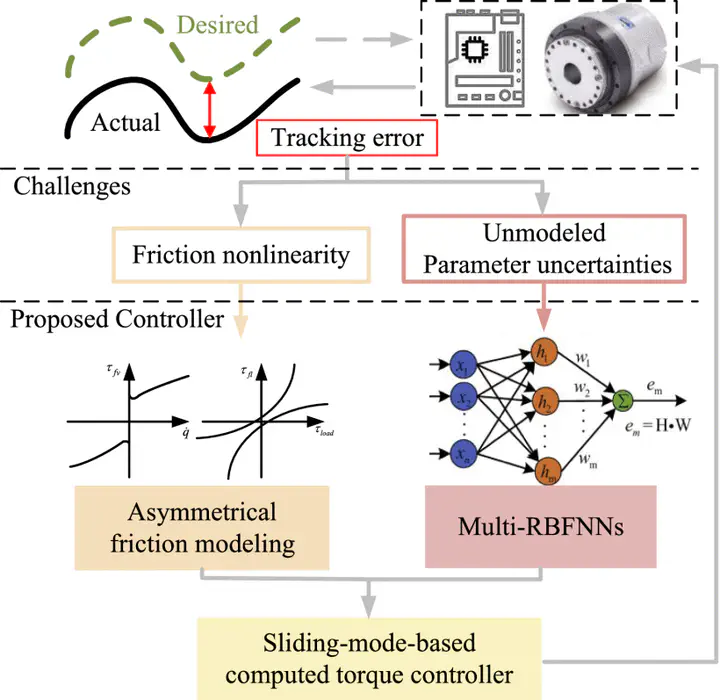 The schematic of the proposed adaptive torque control.
The schematic of the proposed adaptive torque control.
Abstract
The nonlinearity and uncertainty of dynamics pose significant challenges to ensuring the tracking performance of joint trajectories, especially time-varying effects on the load and temperature. In this letter, we present an adaptive neural computed torque control scheme to improve the tracking accuracy of the robot joint towards various tasks, which is a novel semiparametric model including a parametric friction model and a nonparametric compensator trained with multiple radial basis function neural networks (MRBFNNs). Specifically, the asymmetric model considers velocity-, load-, and temperature-dependent friction phenomena. The computed torque controller integrates the sliding mode method and the proposed friction model to reduce the boundary layer of fluctuated disturbances and achieve globally asymptotic convergence. MRBFNNs are trained separately to further compensate for the unmodeled nonlinearity and parameter uncertainty in real time during the trajectory tracking process. The comparative experiments were carried out on a robot joint, validating that our asymmetric model significantly improves correspondence to reality in terms of friction; the proposed control strategy exhibits the superior tracking performance of joints with variable payloads.