Design of a Pipeline Inside Anti-corrosion Robot Using Axiomatic Design Method
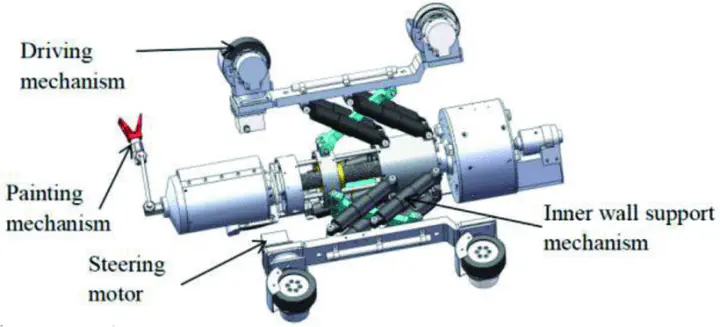 Robot model schematic.
Robot model schematic.
Abstract
With the expanding of pipeline applications and development in related technologies, there is a growing requirement for inside anti-corrosion of pipelines. Currently, there is relatively limited application of robots for large-diameter pipeline inside anti-corrosion, and the design of such robots often facing coupling issues between the locomotion capability and operation requirements. In this study, an axiomatic design method is employed to analyze the design of a pipeline inside anti-corrosion robot, and a decoupling method is proposed to separate the locomotion and the anti-corrosion mechanism. The robot design is implemented with the axiomatic method. Preliminary analysis using dynamic simulation demonstrates that the robot equipped with independently adjustable steering functions works more stably and effectively during anti-corrosion operations pipelines inside.