Visual Servoing With Grid‐Based Directional Error Mapping for Robotic TBM Disc Cutter Replacement
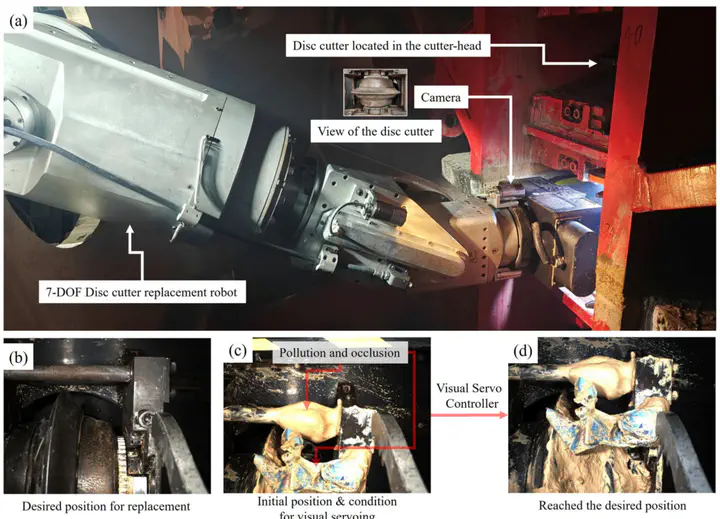 Thetarget application of our methods. (a) the instance for a real application for replacing disc cutters. (b) the image captured at a desired position for disc cutter replacement. (c) the image captured with a serve condition. (d) the image captured when our method successfully reached the desired position.
Thetarget application of our methods. (a) the instance for a real application for replacing disc cutters. (b) the image captured at a desired position for disc cutter replacement. (c) the image captured with a serve condition. (d) the image captured when our method successfully reached the desired position.
Abstract
Tunnel boring machines (TBM) need to replace disc cutters to ensure the efficiency of tunneling, which relies on intensive labor operations in harsh environments, highlighting the urgent need for robotic systems to substitute. Visual servoing is crucial for robots to grasp disc cutters with uncertainty However, traditional methods face significant challenges in environments with unpredictable occlusions, contamination, and damage. Thus, we propose to develop a robust visual servo strategy for the harsh working environment in real TBMs. The major contribution of this strategy includes two parts. First, we propose an image based desired vectors field made up of griddings of image. Second, we propose a direct and constant interaction matrix to map the camera velocity from the image‐based desired vectors. These two parts increase the robustness of visual servoing for the vision‐based controller, especially for working with a polluted environment and servoing uncertain states of the disc cutters. The experiments validated it is a stable, easy‐employing vision controller for overcoming the difficulty in controlling cutter replacement robots in unstatic environment conditions, thus promoting the application of robotic technologies in more field situations.