Design of a multifunctional end-effector for robotic replacement of TBM disc cutters
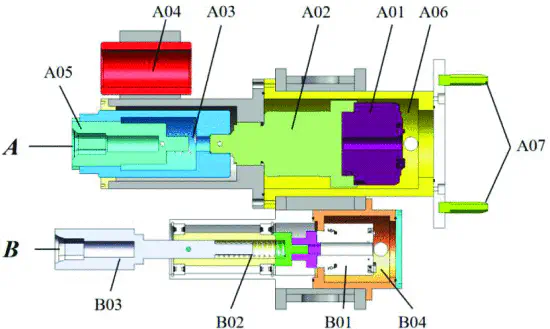 Model of the Combined Wrench Structure. (A) High torque wrench, (B) Low torque wrench: (A01) Rotary actuator, (A02) Torque multiplier, (A03) Spring, (A04) Reaction arm, (A05) High torque socket, (A06) Case, (A07) Rhombus pin. (B01) Rotary actuator, (B02) Spring, (B03) Low torque socket, (B04) Case.
Model of the Combined Wrench Structure. (A) High torque wrench, (B) Low torque wrench: (A01) Rotary actuator, (A02) Torque multiplier, (A03) Spring, (A04) Reaction arm, (A05) High torque socket, (A06) Case, (A07) Rhombus pin. (B01) Rotary actuator, (B02) Spring, (B03) Low torque socket, (B04) Case.
Abstract
The robotic replacement of disc cutters in tunnel boring machine (TBM) is imperative for maintenance tasks’ safety and efficiency. One major challenge is to managing the complex and cumbersome fastening components of disc cutters. This paper introduces a multifunctional end-effector that can grip a combined wrench to facilitate the alignment, fastening, and unfastening of cutter bolts, as well as grip the disc cutter. An integrated cutter house design eliminates the need for the robot to handle small bolts and nuts during remote operations. Additionally, a two-segment bolt design aids in the peg-in-hole procedure, ensuring a high success rate for robotic torque wrench alignment with the main fastening bolt. An alignment strategy for remote robot control is also proposed. We constructed a full-scale mock-up of the TBM disc cutter with the proposed cutter house structure to validate the proposed design and methods. Preliminary experimental results demonstrate the effectiveness of the system’s mechanism and strategy in facilitating the swift assembly and disassembly of heavy disc cutters during replacement processes.