机构创新设计方向

盾构机是现代隧道掘进施工过程中不可或缺的大型自动化装备。然而在对硬质地层进行施工导致刀具频繁发生磨损时,国内外仍然普遍采用传统方式深入地下进行人工换刀。换刀过程伴随着高气压、地层塌方、危险气体等多重恶劣环境危险因素影响,加之刀具质量大、作业环境密闭狭窄等负面特征,人工换刀造成的伤亡事故在全世界范围频频发生。因此采用自动化方案代替人工换刀迫在眉睫。
本实验室对于盾构机换刀机器人的研究取得了如下成果:
(1) 根据盾构机内部空间以及工作任务需求设计了相应的自动换刀机器人系统,包括系统自由度的确定、各关节构型、动力元器件选型以及强度校核等;
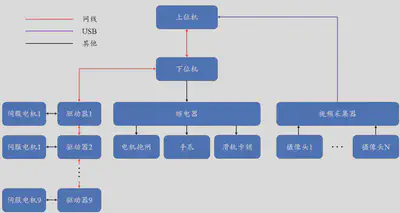
(2) 实现盾构机自动换刀机器人的电气系统设计,并为上下位机编写相应的控制程序(图1);