机器视觉方向

脊髓损伤(spinal cord injury, SCI)是一种严重致残性疾病,常造成截瘫或四肢瘫,会对患者感觉功能、运动功能以及自主神经功能造成影响。SCI 会导致多种并发症,如压疮、肺部感染、尿路感染,并最终造成患者期望寿命的缩短。
目前,针对脊髓损伤患者的治疗医学界主要采取康复训练进行治疗,传统的康复训练是治疗师根据自身主观经验,对患者进行人工手动康复运动,康复动作具有重复性高,动作简单的特点。但这种传统的康复训练方式也存在着治疗师易感疲劳,治疗师的水平不一、缺乏客观评价,难以达到高水准的治疗效果等缺点。另外,我国康复医疗现状滞后,设有康复治疗的医院偏少,而且存在着康复治疗师配备不足等问题,这也加剧了脊髓损伤治疗需求与康复资源不足的矛盾。随着现代康复医学和机器人技术的发展,采用康复机器人代替人工方式恢复脊髓损伤患者肢体运动功能成为可能,并且可有效解决人工方式的效率低、效果差的问题。
本课题旨在研制与脊髓损伤康复机器人机械结构适配的电气控制系统样机,采用模块化集成设计,实现“坐-躺-站”多体位一体化四肢多模式康复训练功能,研究并制定脊髓损伤康复机器人工作过程中的运动安全保护机制,提高机器人辅助康复的安全性和舒适性。
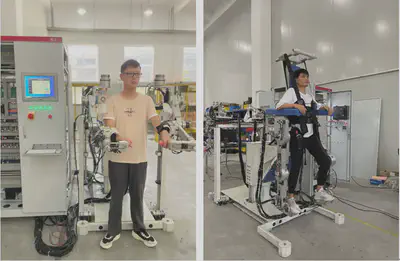
本课题已完成康复机器人控制系统从理论到实物的整体系统开发。控制系统分为硬件系统和软件系统,其中硬件系统为一个电气控制柜,如图1所示,软件系统为一个Windows桌面软件,如图2、图3所示。

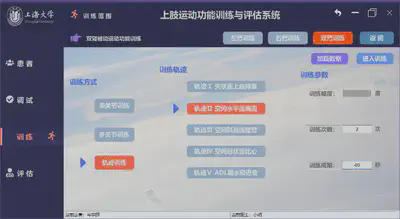

在硬件系统方面,结合国家医用电气设备电磁兼容要求和安全规范两个方面完成了硬件选型、整体布局和走线设计等内容,实现了模块化系统集成的要求。在软件系统方面,利用Visual Studio集成开发环境,基于Winform技术实现了软件上位机界面、中位机通信和下位机底层控制算法的开发与集成,实现了上下肢康复机器人多功能系统集成的要求。
脊髓损伤康复机器人的首要功能是康复训练。本样机具有丰富的训练方式,上下肢康复机器人可进行拆分和组合训练。当上下肢康复机器人处于拆分状态时,上肢康复机器人具有单关节训练、多关节训练和轨迹训练三种模式,下肢康复机器人具有单关节训练、轨迹训练和平衡训练三种模式。当上下肢康复机器人处于组合状态时,可进行摆臂步行联动训练,旨在提高患者训练的真实性和趣味性,帮助患者重新体验正常走路的感觉。每种训练模式均可根据医生的对患者情况的判断设定训练参数,训练参数包括训练次数、训练周期和训练幅度,以帮助患者进行更有效率的康复训练。康复机器人训练过程如图4所示。