上海机器人研究所
上海机器人研究所
主页
新闻
研究
论文
获奖
成员
联系
texture-less
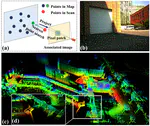
LVIO-Fusion:Tightly-Coupled LiDAR-Visual-Inertial Odometry and Mapping in Degenerate Environments
This letter presented a tightly-coupled LiDAR-inertial-visual framework, which couples the LiDAR and camera at the measurement level.
Zhang Hongkai
,
杜亮
,
鲍晟
,
袁建军
,
Shugen Ma
Cite
×