A teleoperated robotic hot stick platform for the overhead live powerline maintenance tasks
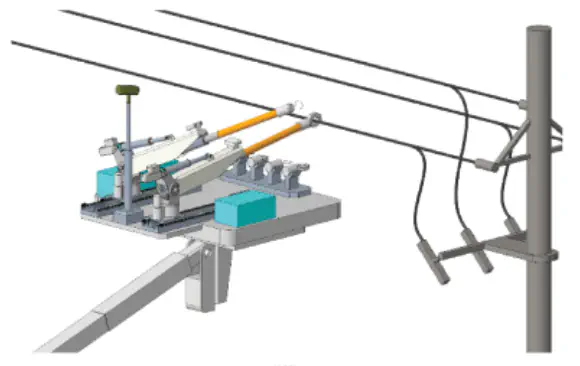 The robotic platform
The robotic platform
Abstract
This paper presents a teleoperated robotic hot stick platform for the overhead live powerline maintenance tasks. It aims to simplify the teleoperated maintenance task operation procedures and promote the application of robotic technologies in the live powerline maintenance field. The robotic hot stick operation mechanism and the detailed teleoperated platform structure are presented. The overall control system architecture is discussed with several important control system features. A typical maintenance task process is demonstrated to further explain the proposed robotic operation mechanism. The robotic platform will improve the electricity grid efficiency, reduce human labor intensity, and most importantly ensure human operator safety. Future work will include robotic platform prototype development and specialized robotic hot stick tools experiment.