A Robotic Gripper Design and Integrated Solution Towards Tunnel Boring Construction Equipment
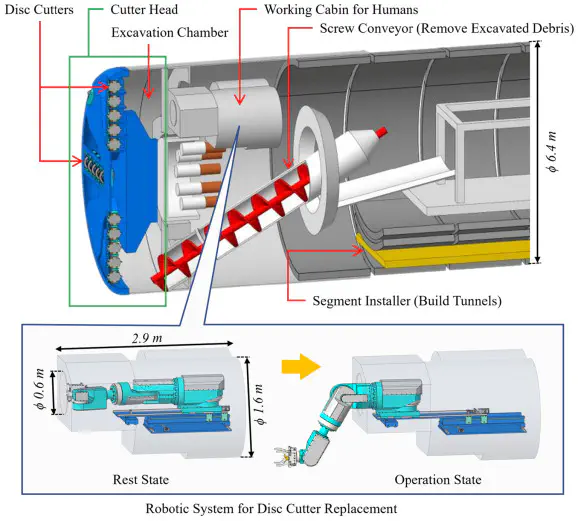 Robotic System for Disc Cutter Replacement
Robotic System for Disc Cutter Replacement
Abstract
Disc cutters are representative cutting tools in tunnel boring machines (TBMs). They are installed at the cutter head of the TBM to disintegrate rocks during tunnel boring. Disc cutters require regular replacement to avoid wear and malfunctions. Currently, most replacement work is performed manually, with intensive labor requirements and hazardous working conditions. To solve these problems, we proposed a robotic solution for disc cutter replacement in a widely used TBM. We used a novel eccentric-locking mechanism to simplify the disc cutter installation and developed a robotic manipulator with high dexterity and a high payload capacity for moving heavy disc cutters within the highly constrained TBM chambers. The proposed system can be operated through a specially designed teleoperation platform, either manually or semi-autonomously. We fabricated and tested a prototype in a laboratory environment and applied it to a real TBM. The results confirm the effectiveness and efficiency of the robotic solution.