Clearance-Adaptive Grasping of Clustered Objects Using Pin-Array Robotic Fingers Under Uncertainty
 Experimental Setup: the seven-DOF collaborative robot from SINSUN is equipped with a Beckhoff C6320-30 industrial PC running the Windows platform.
Experimental Setup: the seven-DOF collaborative robot from SINSUN is equipped with a Beckhoff C6320-30 industrial PC running the Windows platform.
Abstract
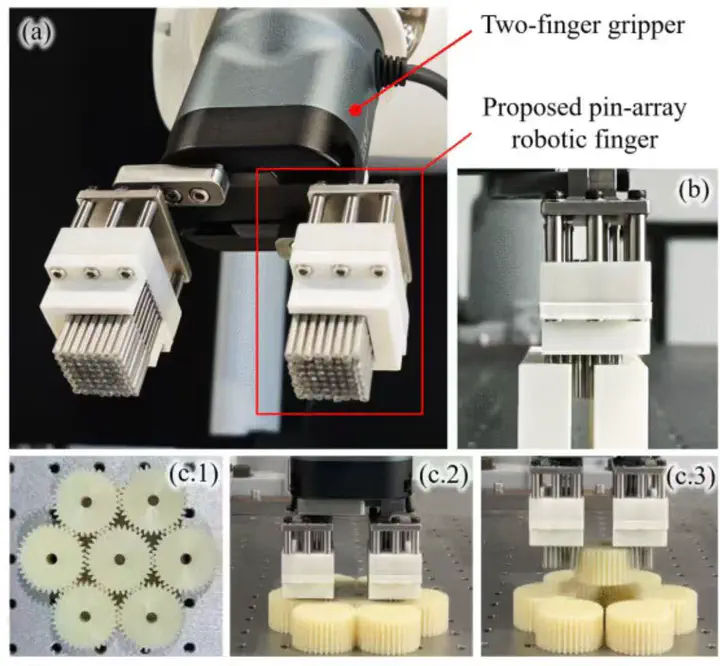
(i) the limited inter-object clearance leaves insufficient space for conventional gripper fingers to approach and wrap the target object without collisions, and (ii) perception-induced position uncertainty makes it difficult to place the fingers precisely into such narrow spaces. Thus, in this letter, we propose a novel robotic finger based on pin-array mechanisms to passively adapt to object clearance between adjacent objects and tolerate pose uncertainty. The tiny pins can be inserted into constrained spaces and thus construct stable grasping pairs. Unlike conventional pin-array mechanisms used in gripper design, the proposed approach utilizes the pin-array for finger design, enabling a gripper equipped with a pair of these fingers to pick objects in significantly narrower spaces than conventional grippers. This gripper also inherits the advantages of the pin-array mechanisms to facilitate shape and error adaptation. Furthermore, we conducted finite element analysis (FEA) to validate the structural design and explore the miniaturization limit, and explain the planning method for autonomous operation. The experiments quantitatively explored the adaptable clearance and validated the feasibility and robustness in real scenarios.