Active cooling system for Tokamak in-vessel operation manipulator
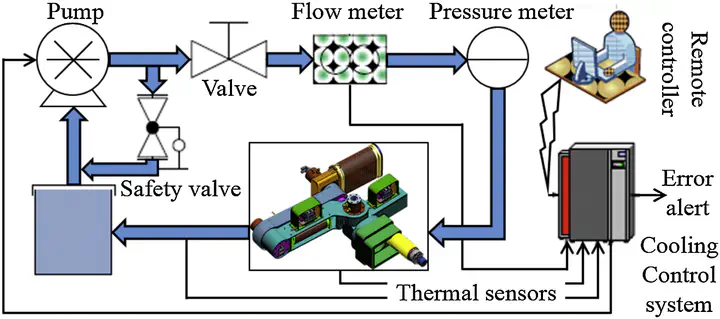 Cooling system structure
Cooling system structure
Abstract
In-vessel operation/inspection is an indispensable task for Tokamak experimental reactor, for a robot/manipulator is more capable in doing this than human being with more precise motion and less risk of damaging the ambient equipment. Considering the demanding conditions of Tokamak, the manipulator should be adaptable to rapid response in the extreme conditions such as high temperature, vacuum and so on. In this paper, we propose an active cooling system embedded into such manipulator. Cameras, motors, gearboxes, sensors, and other mechanical/electrical components could then be designed under ordinary conditions. The cooling system cannot only be a thermal shield since the components are also heat sources in dynamics. We carry out a trial test to verify our proposal, and analyze the active cooling system theoretically, which gives a direction on the optimization by varying design parameters, components and distribution. And based on thermal sensors monitoring and water flow adjusting a closed-loop feedback control of temperature is added to the system. With the preliminary results, we believe that the proposal gives a way to robust and inexpensive design in extreme environment. Further work will concentrate on overall implementation and evaluation of this cooling system with the whole inspection manipulator.