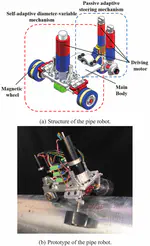
A permanent-magnet wheeled pipe robot with a differential mechanism and slide block and slide rail structure is proposed to enable movement in pipes with variable diameters, and its design is analyzed through CAD modeling, numerical analysis in MATLAB, and magnetic field strength simulation in ANSYS ELECTRONICS software.