A Joint Friction Model of Robotic Manipulator for Low-speed Motion
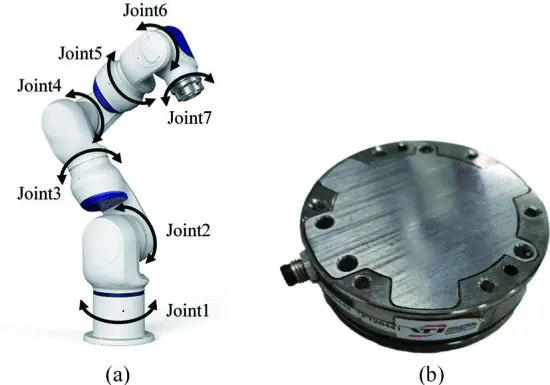 The experimental equipment used in this paper: (a)The 7 DOF robotic manipulator. (b) The six-dimension force sensor.
The experimental equipment used in this paper: (a)The 7 DOF robotic manipulator. (b) The six-dimension force sensor.
Abstract
In this paper, a joint friction model of the robotic manipulator is proposed which is based on the Stribeck model and is applicable to low-speed motion. We consider the effects of velocity and load torque respectively. The model indicates that the joint friction and velocity are nonlinearly related, meanwhile, the load torque affects the degree of nonlinearity. The accuracy of the model is expressed by fitting with experimental data and comparing different friction models with actual friction. The result shows that the proposed model has higher accuracy than other models, especially at lower speeds, therefore the friction model can be better applied to the force control of manipulator.
Type
Publication
2021 IEEE International Conference on Robotics and Biomimetics (ROBIO)