Design of a standalone joint module toward real EAST in-vessel operation use
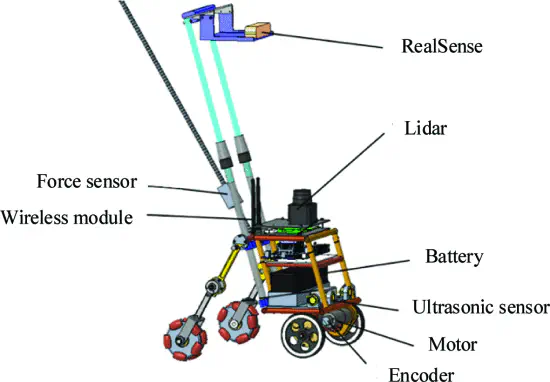 The integral design of the robot
The integral design of the robot
Abstract
In this paper, a novel guide robot for blind people based on an elastic rope and a force sensor is proposed, which overcomes the shortcomings of the existing guide robot which uses rigid stick to pull the blind people and brings uncomfortable guiding experience. The robot has the advantages of simple structure, low cost, light weight, foldability and portability. While walking, blind people can adjust the speed of the robot at any time to match his own speed, which can play a reliable and safe following effect. Experiments are carried out in an office and a larger factory. The results show that the feedback force and speed are always kept in a small and stable range during the process of the robot pulling the blind people, so the user experience is good. And blind people can be safely and reliably brought to the target location.