Paper Made Grippers for Soft Food Grasping
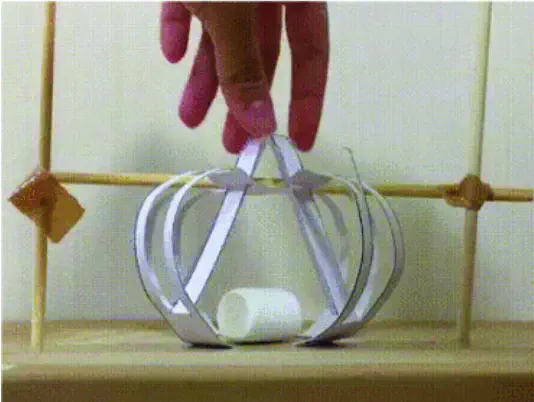 Kirigami gripper
Kirigami gripper
Abstract
Soft food grasping in the food processing field is challenging for traditional robot hands because of the large demand, special hygiene cleanness and damage-free requirements. The paper-made grippers are low-cost and disposable to solve the crucial cleanness problem and they have soft structures which can adapt to the object shapes to avoid possible grasping damages. In this paper, we propose two paper-made grippers for the increasing soft object grasping requirements in the food processing field. One gripper uses a biomimetic mechanism of human hand to provide a force-closure grasping capability, and the other one uses a scoop mode to achieve a shape- closure grasping capability. Both grippers are low-cost, easy- fabrication and with simple actuation mechanism to enable a mass production. Experiments with different gripper designs were carried out to compare the two grippers performance, and preliminary results proved the possibility of applying these paper grippers for the food processing field.