Underactuated Picking Gripper for Grasping and Cutting Citrus
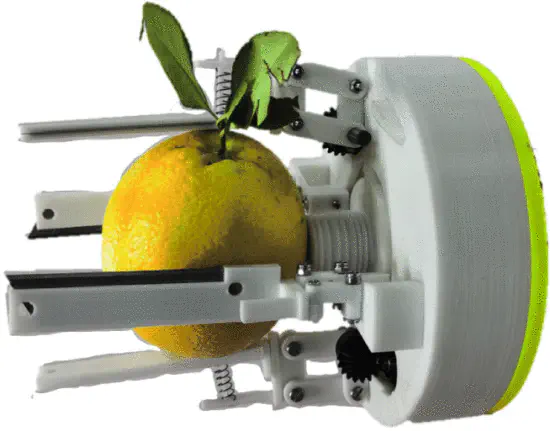 Prototype of the picking gripper
Prototype of the picking gripper
Abstract
This paper presents an underactuated picking gripper with a differential gear train for autonomous harvesting of citrus. The picking gripper is mainly composed of a differential gear train, a resistance regulation and shifting mechanism, active grippers and passive grippers. It can complete the two actions of grasping and cutting and can passively adapt to the size of the citrus as well as keep grasping force constant for cutting using only one motor. We described the design of the mechanism and fabricated a prototype for an experiment. The result proved that the picking gripper can adapt to the 5-10cm diameter of the citrus and keep the grasping force constant to avoid damaging the citrus. By adjusting the size of the picking gripper, it can also be applied to other fruit with spherical elastic surfaces.