上海机器人研究所
上海机器人研究所
主页
新闻
研究
论文
获奖
成员
联系
in-pipe Inspection Robot
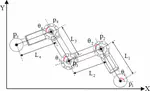
Visualized Small-size Pipeline Model Building Using Multilink-articulated Wheeled In-pipe Inspection Robot
This paper proposes a solution using a wheeled robot and IMU/encoder sensors to create a visual model of small pipelines, with a multi-sensor fusion algorithm and gravity error elimination, verified through experiments in a U-shaped pipeline.
Guo Dianzhen
,
Yuan Zhaohan
,
鲍晟
,
袁建军
,
MA Shugen
,
杜亮
Cite
×