上海机器人研究所
上海机器人研究所
主页
新闻
研究
论文
获奖
成员
联系
manipulators
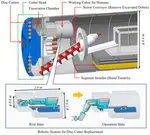
A Robotic Gripper Design and Integrated Solution Towards Tunnel Boring Construction Equipment
A robotic solution for disc cutter replacement in tunnel boring machines has been proposed and tested, using an eccentric-locking mechanism and a high-dexterity robotic manipulator for heavy lifting in confined spaces.
杜亮
,
袁建军
,
鲍晟
,
Guan Renming
,
WAN Weiwei
Cite
×