An Integrated Software System Designed for Upper Limb Rehabilitation Robot
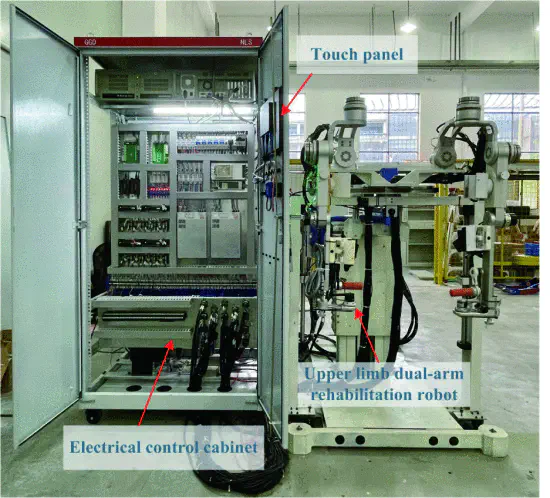 Upper limb rehabilitation robot prototype
Upper limb rehabilitation robot prototype
Abstract
High treatment efficiency is urgently required considering the contradiction between the increase of spinal cord injury cases and the shortage of therapists. Hence, we design an integrated software system to solve the treatment efficiency problem by combining the administration and evaluation functions of a therapist with the training and testing functions of a rehabilitation robot. All information of therapists and patients is administrated digitally through a three-layer administration framework. A multi-modal training method library is developed to assist therapists in formulating individualized passive rehabilitation training programs for various patients. What’s more, we propose a safety protection strategy for the safety of patients based on a joint angle filtering algorithm. The system was shown to improve hospital administration efficiency and to provide comprehensive, smooth, and safe upper limb rehabilitation training for patients. This paper provides a feasible solution to the contradiction between poorly integrated rehabilitation robot software systems and a shortage of therapists.