A Robotic Gripper Design and Integrated Solution Towards Tunnel Boring Construction Equipment
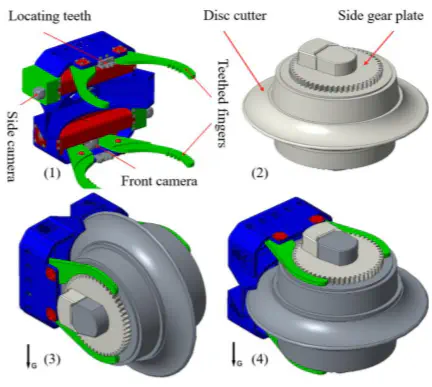 The robotic gripper and disc-cutter
The robotic gripper and disc-cutter
Abstract
Creative design of grippers on their configurations, mechatronics control system, and multi-component collaborative algorithms is often utilized to realize complex operations in industrial applications, due to the environmental constraints or specific task requirements. Firstly, this paper introduces the background problems. As the main automatic equipment – the shield machine – in the field of tunnel boring construction, needs frequent tool (cutter) replacement during underground process, but has no practical automatic method yet, due to heavy payload, complex environment and work procedure. Thus, an integrated solution was proposed by developing a specific gripper and a snake-like manipulator to accomplish tool replacement in a cooperative way. Through simple and unique design of relative components, the solution realizes a fully automatic and precise approach including heavy load tool grasping and regrasping, posture adjustment, unlocking and disassembly, and installation and locking. Finally, this paper also describes the experimental process of tool replacement by the prototype under a real working condition, and discusses the feasibility of putting the scheme into practical application through comparison.